The Problem and Current Solutions
Restoring the dexterous motions of the human hand after a few fingers have been amputated is a challenging task. Most current solutions to control prosthetic fingers involve what is called electromyography (EMG). EMG involves sensing contractions of a healthy muscle somewhere else on the body. These movements are measured by electrodes, and are used to control a robotic finger. Here is a video (reproduced under CC-BY license) demonstrating EMG.
In this video, the electrodes on the man’s arm are picking up its contraction. Then the robotic gripper can be instructed to close.
Unfortunately, EMG can be expensive and non-intuitive, leading to high amputee rejection rates.
In this video, the electrodes on the man’s arm are picking up its contraction. Then the robotic gripper can be instructed to close.
Unfortunately, EMG can be expensive and non-intuitive, leading to high amputee rejection rates.
Our Solution: Detect Use-Patterns
We can simplify the problem. First note that an amputee will only rely on a few primary configurations of the hand, which we call use-patterns. Some examples are holding a cylindrical object like a water bottle or holding a wallet.
In the case of a few amputated fingers, we can reliably predict which use-pattern is being assumed by measuring the locations of an amputee’s healthy fingers. Then, control signals can be sent to a robotic finger to move to the desired location, completing the grip.
In the case of a few amputated fingers, we can reliably predict which use-pattern is being assumed by measuring the locations of an amputee’s healthy fingers. Then, control signals can be sent to a robotic finger to move to the desired location, completing the grip.
The Device
We built a glove with five flex sensors on it - one for each finger (See Figure 1). Each flex sensor can measure how far the corresponding finger is bent. (A video of our glove in action can be found at the bottom of this page.)
Algorithms for Use-Pattern Detection
We designed an algorithm and tested it using MATLAB simulations. It had very high success rates; for single-finger amputation simulations, it succeeded 96.5% of the time. For two-finger amputation simulations, it succeeded 92.5% of the time. (For a full table of results, see Table 1.)
These are the five use-patterns implemented for the proof-of-concept.
These are the five use-patterns implemented for the proof-of-concept.
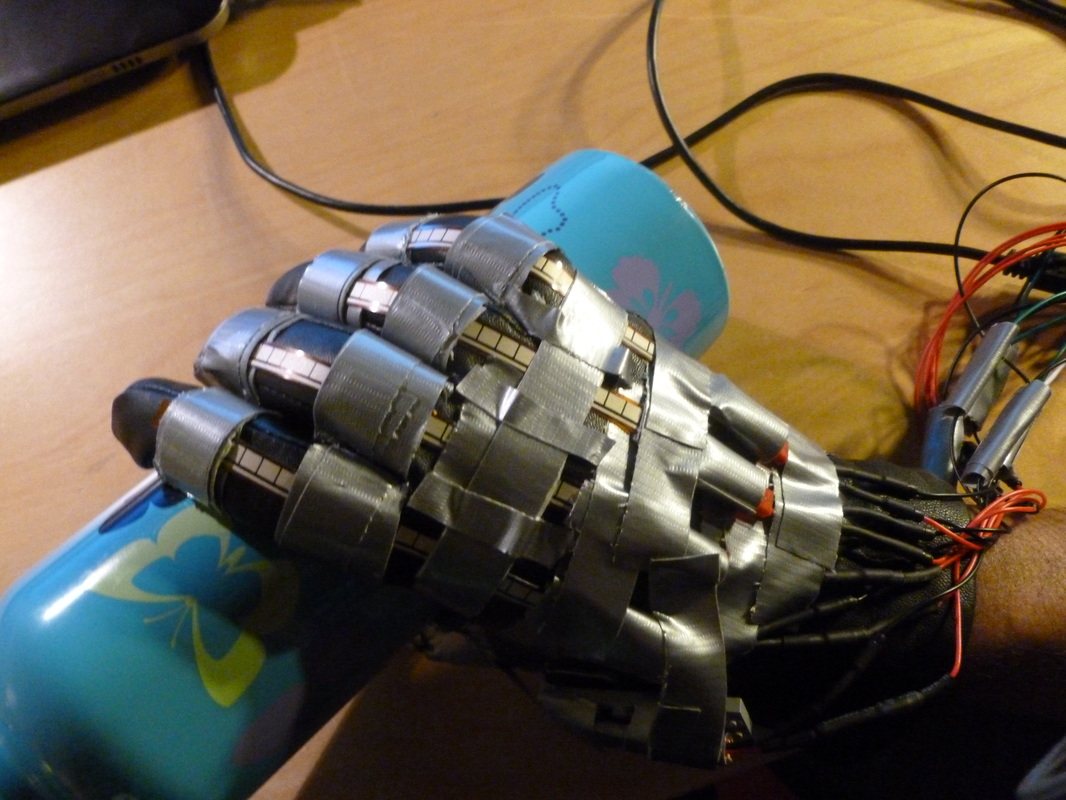


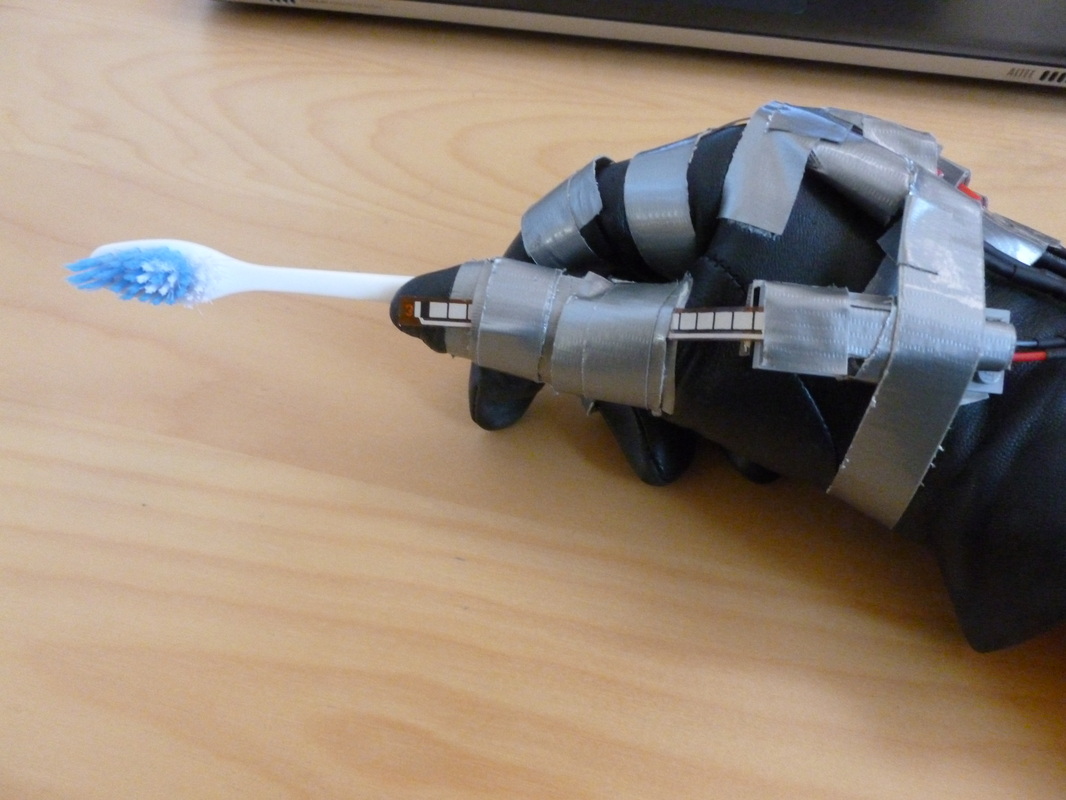

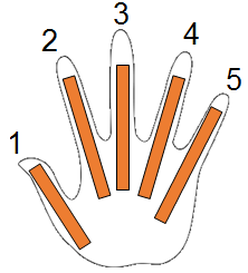
Figure 1 (a): A schematic showing the five flex sensors (orange) mounted on the fingers.
|

Figure 1 (b): The glove
|

The glove in action: 0:48 - 1:25.
